Workshop
Robot Builds
Real engineering projects: tracked robots, autonomous UGVs, marine drones, and GNSS-integrated platforms built and documented from concept to deployment.
Watch on YouTube Explore BuildsAbout the Workshop
Advancing Precision & Autonomous Robotics
The DigInto workshop focuses on the design, build, and documentation of autonomous platforms, from 3D-printed tracked robots to GNSS-guided unmanned ground and surface vehicles. Each project is built to demonstrate real-world engineering principles, documented in detail, and made accessible to hobbyists and commercial developers alike.
Led by Steve Zerafa, co-founder of DigInto and founder of PIXAM, the workshop bridges academic research and practical deployment, covering robotics, geo-robotics, GNSS integration, and autonomous navigation systems.
Builds
Workshop Projects
Each build is documented with component breakdowns, assembly guides, wiring diagrams, and field test results.
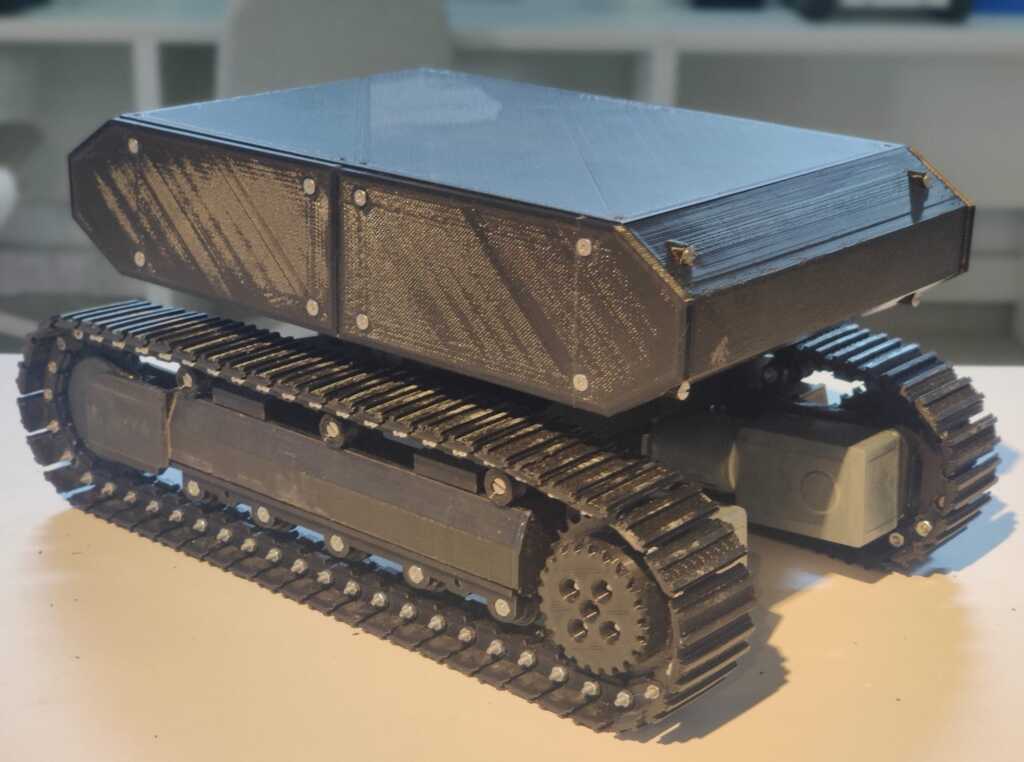
DART Mobile Tracked Robot
Versatile tracked robot with a user-friendly undercarriage design that can be effortlessly constructed by anyone with access to a 3D printer. Includes comprehensive component explanations, wiring instructions, and a full assembly guide.

KNOX Electric 4-Wheel UGV
Electric unmanned ground vehicle functioning as a 4-wheeled autonomous platform with manual operation and waypoint navigation using GNSS RTK systems achieving centimetre-level accuracy.

GNSS Crawler Autonomous RTK Platform
Compact autonomous crawler powered by PPP RTK technology delivering 5 cm positioning precision. Designed for tight and confined spaces with an integrated online tool for waypoint programming.

REEF 3D Printed Unmanned Surface Vehicle
Cost-effective 3D-printed boat drone with manual control and programmable autonomous route capabilities using Google Maps waypoints. Part 2 extends the platform to a full autonomous USV.
Follow every build. Watch every test.
Full build videos, field trials, and technical walkthroughs published on YouTube.
Watch on YouTube Get in Touch